Semantically Informed MPC for Context-Aware Robot Exploration
IROS 2023, IROS WS 2022
Semantics informed costmap prediction for object goal navigation using MPC.

I am an ML/CV engineer at SafeAD working on 3D object detection and HD maps using transformers. During my masters at the University of Bonn, I worked as a student researcher at StachnissLab and did my master thesis at Bosch Research in Renningen, DE.
Before that, I was a research assistant at Robotics Research Center, IIIT Hyderabad. I did my bachelors in mechanical engineering from IIT Roorkee.

Semantics informed costmap prediction for object goal navigation using MPC.
Probabilistic version of IVO using chance constraints for taking uncertainty into account.
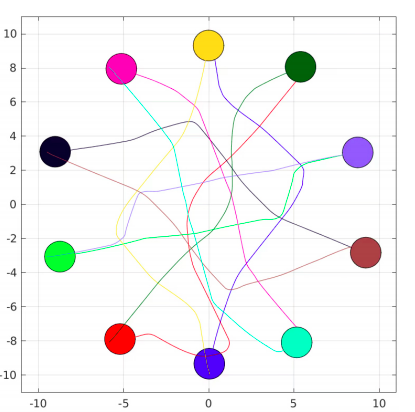
Inverse version of Velocity Obstacles with ego-frame formulation shown for real-time and mult-agent setting.
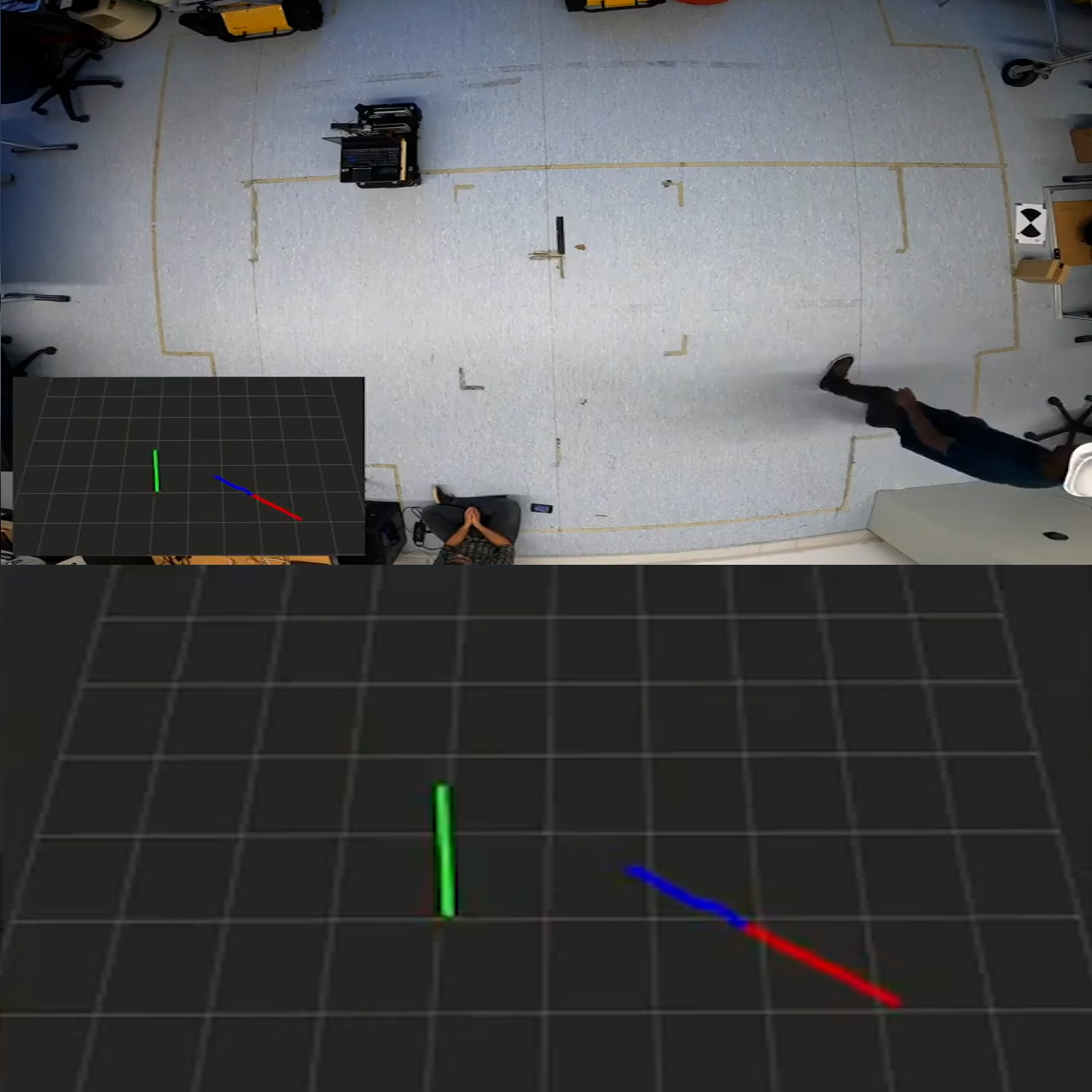
Compared human motion prediction techniques - SocialGAN and maximum entropy method with ROS implementation. Real life implementation on KUKA youbot.
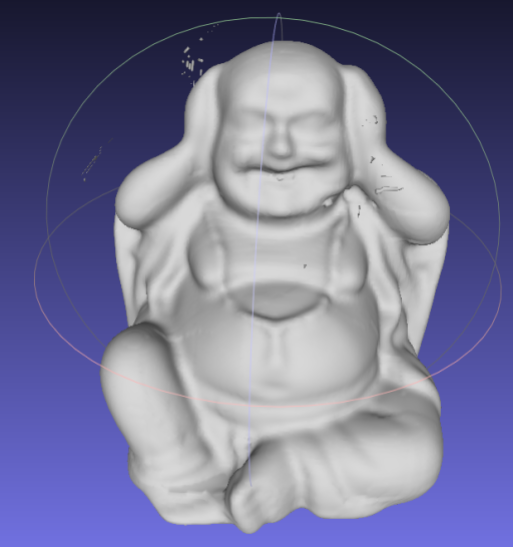
Making poisson surface reconstruction incremental by using solution from previous frame as dirichlet boundary condition in the laplace equation.

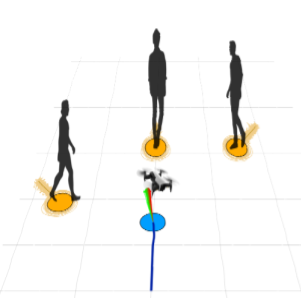
Implementing dynamic obstacle avoidance on Bebop drone using collision cone constraint. This was done for both holonomic and non-holonomic settings.
Investigated learning MPC controller. Using input of future desired states and the current state, control commands for positional tracking are generated. Simulations were done in ROS using RotorS simulator.

Learning control policy using DQN for navigation of a quadcopter in AirSIM using depth images to reach the destination point. We trained the policy for two cases: 2D and 3D action space to compare performance. Published at IEEE AUTEEE.

Involved in the design and fabrication of our self designed formula style electric race car as Powertrain Head for 2017 car. Introduced the vehicle dynamics team leading the vehicle dynamics model design, active slip yaw controller, etc.
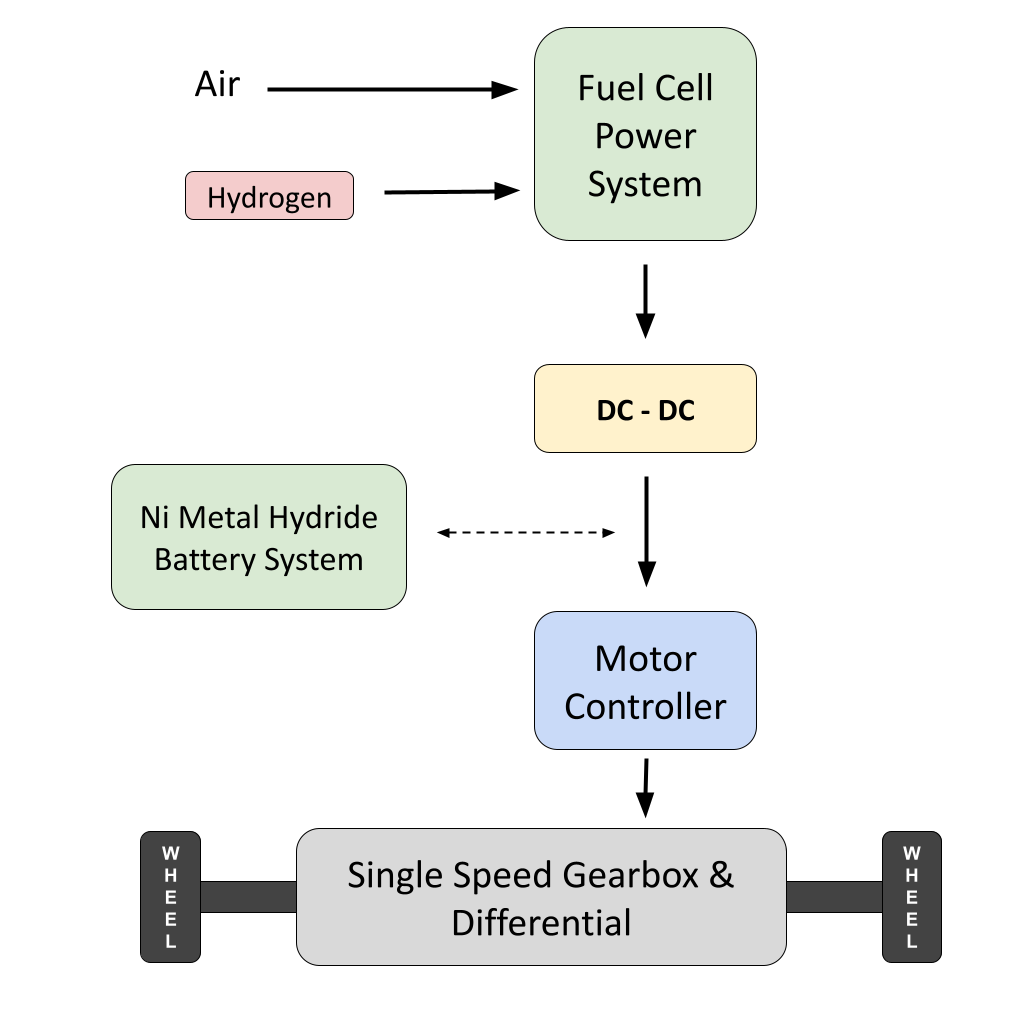
The work involved learning about modelling systems, simulating and designing controller for various sub-systems of a fuel cell vehicle.